
上篇介紹了ETOPO和(hé)GTOPO30兩個全球DEM數據産品家族,作為(wèi)最早的(de)全球DEM數據産品,受制于當時的(de)數據獲取手段,均采用已有數據源彙集編制的(de)生産方法,在高(gāo)程系統一(yī)緻性、獲取時間一(yī)緻性、分辨率、精度評價、更新等幾個方面存在或多或少的(de)問題。随着衛星遙感技術的(de)發展,獲取全球範圍一(yī)緻質量的(de)高(gāo)分辨率數字高(gāo)程數據成為(wèi)可(kě)能。目前應用最廣泛的(de)免費高(gāo)分辨率全球DEM數據均采用衛星遙感技術獲取和(hé)生産,同時,衛星遙感技術也成為(wèi)了生産全球大區域覆蓋、高(gāo)質量DEM數據的(de)主要數據源獲取技術。本篇和(hé)大家一(yī)起走進基于衛星遙感技術獲取全球DEM數據這個領域。
四大流派
基于衛星遙感技術獲取全球DEM數據的(de)系統類型主要有以下四種:光學(xué)立體像對(Stereo Satellite Imagery)、合成孔徑雷達(SyntheticAperture Radar)、雷達測高(gāo)(Radar Altimetry)、激光測高(gāo)(Laser Altimetry)
先看光學(xué)立體像對這一(yī)脈


SPOT衛星曆史悠久,二戰後被戴高(gāo)樂(yuè)總統帶上巅峰的(de)法國(guó),僅晚于美國(guó)3年(nián)于1961年(nián)就成立了法國(guó)國(guó)家太空研究中心(Centre National d’Etudes Spatiales,簡稱CNES,美國(guó)國(guó)家航空航天局,即NASA,于1958年(nián)由艾森豪威爾總統主導成立),CNES在1986年(nián)發射了SPOT1星,1988年(nián)就有研究人員基于跨軌道(dào)SPOT衛星像對數據成果提取了DEM數據。這應該算是最早的(de)基于衛星遙感光學(xué)立體像對技術獲取DEM數據的(de)實踐了,SPOT星座後續相繼有SPOT2、SPOT3、SPOT4、SPOT5、SPOT6以及2014年(nián)發射的(de)SPOT7,SPOT系列衛星的(de)數據産品目前由空中客車國(guó)防航天公司(Airbus Defence and Space)負責經營,對外提供基于SPOT5衛星的(de)30m分辨率全球DEM數據産品Reference3D,AIRBUS作為(wèi)全球最重要的(de)衛星遙感數據産品提供商,還提供多種更高(gāo)分辨率的(de)DEM數據産品,具體待下一(yī)篇介紹商業DEM數據産品時再詳細介紹。
聊完SPOT,下面介紹本篇的(de)第一(yī)位主角ASTER GDEM,目前應用最廣的(de)免費全球DEM數據産品之一(yī),ASTER是傳感器的(de)名字,其全稱為(wèi)先進星載熱發射和(hé)反射輻射計(The Advanced Spaceborne Thermal Emission andReflection Radiometer ,簡稱ASTER),于1999年(nián)12月搭載NASAEOS系統旗艦衛星Terra升空,從2000年(nián)開始回傳數據,ASTER是由美國(guó)國(guó)家航空航天局(NASA)、日本經濟産業省(METI)、日本航天局(Japan Space Systems,成立于1986年(nián),日本二戰後最輝煌的(de)年(nián)代,可(kě)以看出航天領域的(de)發展絕對和(hé)一(yī)個國(guó)家的(de)整體實力成正比)。ASTER傳感器采集的(de)是15m分辨率的(de)同步光學(xué)立體像對,基于上述光學(xué)立體像對生産全球DEM數據ASTER Global DEM,即ASTER GDEM。
NASA和(hé)METI于2009年(nián)6月28日共同發布了ASTER GDEM v1數據産品,并宣布向全球用戶免費開放下載使用。ASTER GDEM v1采用全自(zì)動的(de)生産方式,并首創無控制點絕對DSM數據生産方法,通過一(yī)年(nián)的(de)時間完成了ASTERGDEM測試版本數據生産處理(lǐ)。
注:
傳統基于衛星光學(xué)立體像對生産DEM數據,必須提供具有高(gāo)精度水平和(hé)垂直坐标的(de)外部大地(dì)控制點以獲得絕對(地(dì)理(lǐ)參考)DEM;否則所獲得的(de)數據都是相對DEM。由于改進了衛星星曆表和(hé)ASTER儀器的(de)傳感器模型的(de)位置信息,ASTER DEM能夠充分進行地(dì)理(lǐ)定位(具有絕對坐标),無需外部控制點。這種方法有力提升了大量數據的(de)處理(lǐ)效率,能夠滿足全球大面積DEM數據生産處理(lǐ)的(de)需求。
2011年(nián)10月中旬,NASA和(hé)METI共同發布了ASTER GDEM v2版本,在v1的(de)基礎之上,新增了26萬光學(xué)立體像對數據,主要用于改善覆蓋範圍、提升數據分辨率、提升水體掩模處理(lǐ)精确度。
2019年(nián)8月5日,NASA和(hé)METI共同發布了ASTER GDEM v3版本,在v2的(de)基礎之上,新增了36萬光學(xué)立體像對數據,主要用于減少高(gāo)程值空白區域、水域數值異常。

伴随v3同時發布了一(yī)個新的(de)全球數據産品:ASTER水體數據集(ASTER Water Body Dataset,簡稱ASTWBD),每一(yī)幅ASTER GDEM數據都有對應的(de)水體數據,ASTWBE也是目前基本能夠覆蓋全球的(de)唯一(yī)水體數據。
ASTER GDEM三個版本基本屬性表如(rú)下:

v3版本數據在有效覆蓋範圍,高(gāo)程精度方面有顯著提升,建議大家在應用研究中直接使用v3版本的(de)ASTER GDEM數據産品。
ASTER GDEM對全球用戶免費開放下載使用,目前國(guó)內(nèi)提供的(de)下載源基本都是v1版本數據,建議大家直接下載v3版本的(de)數據進行研究應用。NASA和(hé)METI提供的(de)GDEx(The Global Data Explorer)在2019年(nián)8月6日已經關閉

如(rú)果需要下載數據可(kě)以直接訪問LD DAAC直接下載分幅數據包,這個是一(yī)個FTP服務器,注冊後可(kě)以直接分幅下載,然後自(zì)己進行拼接即可(kě)。全球範圍一(yī)共22608個文件(沒有官方文檔提到的(de)22912,目前不知原因),共計373GB,如(rú)果大家有需要可(kě)以關注公衆号“空間數據研究所”,不超過一(yī)個省的(de)話會直接發給大家,主要是網絡壓力有點大。


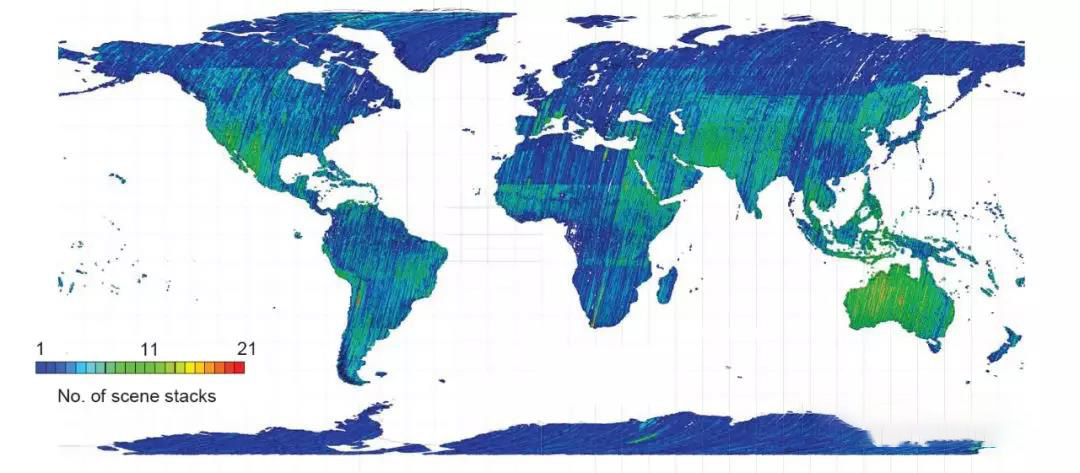
再看數據處理(lǐ)部分,JAXA基于PRISM(The Panchromatic Remote-sensing Instrument for Stereo Mapping)傳感器采集的(de)光學(xué)立體像對數據,同時開發了一(yī)個高(gāo)速光學(xué)立體像對數據處理(lǐ)系統,每天處理(lǐ)2TB數據(2000幅),經過兩年(nián)多完成了全球範圍的(de)數據共計300萬個場景的(de)數據處理(lǐ)和(hé)驗證工作,于2016年(nián)對外發布了AW3D産品,全球第一(yī)個5m分辨率的(de)全球DSM産品(部分區域可(kě)提供0.5m、1m、2m、2.5m等不同分辨率的(de)DSM數據産品,這個确實牛,值得學(xué)習)。






合成孔徑雷達(SyntheticAperture Radar,簡稱SAR),屬于一(yī)種微波成像雷達,是一(yī)種主動遙感技術,目前廣泛用于獲取數字高(gāo)程數據。基于合成孔徑雷達雷達數據提取DEM數據主要有兩種方法:雷達攝影測量(Radargrammetry),SAR幹涉測量(SAR Interferometry)。
雷達攝影測量與光學(xué)光學(xué)立體像對類似,利用雷達回波成像獲取光學(xué)立體像對,進而獲取DSM數據,始于20世紀70年(nián)代的(de)機載雷達,20世紀80年(nián)代NASA開始提供航天成像雷達(Shuttle Imaging Radar,簡稱SIR)數據,20世紀90年(nián)代初歐洲發射了ERS-1(The First European Remote Sensing Satellite),開啓了衛星雷達攝影測量時代。
SAR幹涉測量是一(yī)種利用雷達返回信号中的(de)相位信息的(de)技術,通過測量每個像素的(de)雷達回波之間的(de)相位差,然後執行互相關來生成相位差“圖像”,相位差圖像中的(de)輪廓對應于地(dì)形高(gāo)度的(de)輪廓,再結合平台位置和(hé)姿态信息、控制點将相位差轉換為(wèi)地(dì)形高(gāo)度,最終獲取DEM。SAR幹涉測量通常被稱為(wèi)IFSAR,也稱為(wèi)InSAR。
2000年(nián)2月11日,NASA和(hé)NGA合作發起航天飛(fēi)機雷達地(dì)形測量任務(The Shuttle Radar Topography Mission,簡稱SRTM),在NASA航天飛(fēi)機上搭載SIR-C/X-SAR雷達成像設備,進行了11天的(de)數據采集任務,獲取了全球80%的(de)陸地(dì)(北緯60度和(hé)南緯56度之間的(de)所有陸地(dì)區域)的(de)幹涉數據,随後通過SAR幹涉測量法生産了SRTM數據産品,這一(yī)項目不僅為(wèi)後續基于SAR幹涉測量方法的(de)全球DEM數據生産奠定了至關重要的(de)基礎,同時也産生了大名鼎鼎的(de)全球DEM數據SRTM。下面就給大家介紹合成孔徑雷達一(yī)脈的(de)扛把子(zǐ)SRTMGL。
基于NASA航天飛(fēi)機雷達成像設備獲取原始數據後,NASA噴氣推進實驗室(Jet Propulsion Laboratory,簡稱JPL)設計開發了SRTM數據處理(lǐ)系統GDPS(SRTM Ground Data Processing System,簡稱GDPS)用于處理(lǐ)SRTM數據,并制定了宏大的(de)數據産品計劃

為(wèi)了趕在ASTERGDEM産品發布之前對外公布基于遙感技術的(de)全球高(gāo)分辨率DEM數據産品,NASA JPL 2000年(nián)就發布了SRTM v1版本,雖然隻是完成了部分産品,但仍然站在了基于遙感技術獲取全球DEM數據技術和(hé)行業的(de)最前端。
随後,NGA開始接手SRTM數據的(de)處理(lǐ)工作,于2006年(nián)完成了所有規劃産品的(de)生産,正式對外提供全面的(de)SRTM DEM v2版本數據,根據規定,在美國(guó)領土範圍內(nèi)免費提供1 arc-second(30m)分辨率的(de)SRTM DEM數據,其他區域可(kě)以免費獲取3 arc-second(90m)和(hé)30arc-second(1000m)分辨率的(de)SRTM DEM數據(USA傳統做(zuò)法,占據某一(yī)領域最前沿,然後開始打壓其他國(guó)家在該領域的(de)發展,并同時保持自(zì)己在該領域的(de)絕對領先)。
為(wèi)了繼續保持在全球DEM數據領域的(de)領先,NASA借助最新的(de)項目MEaSUREs (Making Earth System Data Records for Use in Research Environments)着手升級SRTM DEM數據産品,這次升級工作又回到JPL手中,JPL接手後先對數據錯誤進行了修正,發布了v2.1版本,随後發大招,融合ASTER GDEM v2、USGS GMTED2010、USGS NED(National Elevation Dataset)數據,于2015年(nián)10月發布了SRTM Plus即v3版本産品,SRTM Plus所有數據向全球用戶免費開放下載使用,包括SRTMGL1、SRTMGL3和(hé)SRTMGL30三種不同的(de)分辨率的(de)全球DEM數據産品,其基本屬性如(rú)下

目前空間數據研究所已經完成SRTMGL1 v3全球DSM數據下載和(hé)拼接處理(lǐ),全球範圍共計129GB(如(rú)果大家有需要可(kě)以關注公衆号“空間數據研究所”,不超過一(yī)個省的(de)話會直接發給大家,主要是網絡壓力有點大),整體效果如(rú)下

原始數據如(rú)下

合成孔徑雷達這一(yī)脈由SRTM打下江山,但畢竟是上世紀的(de)技術和(hé)成果了,不僅無法PK ALOS AW3D這樣牛哄哄的(de)産品,甚至面對ASTER GDEM v3這樣的(de)老樹新花都有點有心無力。
首先,德國(guó)人看不下去(qù)了(因為(wèi)德國(guó)2000年(nián)就參與了SRTM項目,在NASA的(de)航天飛(fēi)機上搭載了X頻段的(de)雷達用于獲取高(gāo)分辨率的(de)DEM數據,也算是合成孔徑雷達這一(yī)脈的(de)老前輩了),于是由德國航空航天中心(Deutsches Zentrum für Luft- und Raumfahrt,簡稱DLR)和(hé)EADS Astrium合作,于2010年(nián)啓動了TanDEM-X項目,扛起SAR幹涉測量的(de)大旗,基于TerraSAR-X衛星平台,開啓SAR幹涉測量生成全球DEM數據的(de)新時代。
2007年(nián)6月15日TerraSAR-X衛星在俄羅斯發射升空,希望TerraSAR-X能給我們帶來更好的(de)全球DEM數據産品。

嚴格來講,雷達測高(gāo)不屬于全球DEM數據這個江湖,因為(wèi)雷達測高(gāo)最初設計目标主要用于測量海面高(gāo)度和(hé)冰蓋地(dì)形。目前也被用于在陸地(dì)區域獲取分幅高(gāo)程數據。目前應用較為(wèi)廣泛的(de)雷達測高(gāo)平台有ERS(EuroPean Remote Sensing Sateillte)和(hé)Envisat(2002年(nián)發射升空,2012年(nián)失去(qù)通信),平台上的(de)雷達高(gāo)度計儀器收集的(de)數據有力推動了大面積地(dì)形應用中雷達測高(gāo)方案的(de)應用,鑒于其但提供的(de)高(gāo)垂直精度數據,可(kě)用于驗證或檢查其他大面積海拔數據集的(de)質量),另外主要用于在格陵蘭島(最近特朗普要從丹麥買的(de)那個島)和(hé)南極洲生成更新高(gāo)質量的(de)DEM。除了陸地(dì)地(dì)形,雷達高(gāo)度計數據已成功處理(lǐ)用于繪制海洋水深測量圖,這些測深數據已與SRTM30的(de)土地(dì)數據合并,生成覆蓋陸地(dì)和(hé)海洋的(de)全球高(gāo)程數據集。
和(hé)雷達測高(gāo)一(yī)樣,激光測高(gāo)也不屬于全球DEM這個江湖。激光測高(gāo)法,通常稱為(wèi)LiDAR,同樣是一(yī)種主動的(de)遙感技術,能夠用于獲取厘米級垂直精度的(de)高(gāo)程數據。攜帶地(dì)球科學(xué)激光高(gāo)度計系統(GLAS)的(de)ICESat平台于2003年(nián)發射,并在大部分地(dì)區收集了LiDAR數據(約70米分辨率),覆蓋全球陸地(dì)表面(南北緯86度)。由于激光測高(gāo)所提供的(de)高(gāo)垂直精度,GLAS的(de)主要任務是收集重複地(dì)形測量值以監測極地(dì)冰蓋,目前這一(yī)任務已成功完成。
ICESat平台獲取的(de)高(gāo)精度高(gāo)程數據目前也用于開發高(gāo)質量的(de)南極洲DEM數據。除了極地(dì)監測的(de)主要任務目标外,ICESat平台獲取的(de)高(gāo)精度高(gāo)程數據已被證明可(kě)用作驗證其他全球DEM源數據的(de)參考控制數據,特别是SRTM DEM數據産品。
本篇和(hé)大家分享了三個全球DEM數據産品:ASTER GDEM、ALOS AW3D30、SRTM Plus,他們整體可(kě)以分為(wèi)兩類:基于衛星遙感光學(xué)光學(xué)立體像對技術獲取的(de)全球DEM數據,基于衛星遙感雷達測量技術獲取的(de)全球DEM數據。
首先,在具體的(de)研究應用過程中,首先需要了解兩類全球DEM數據的(de)特性,然後根據應用場景來确定采用哪一(yī)個全球DEM數據産品。數據空洞可(kě)能是影響DEM使用的(de)主要特性。
對于SRTM Plus而言,數據空洞主要是由于雷達信号與陡峭的(de)地(dì)形相互作用(從而導緻陰影,縮短(duǎn)或停留)以及水或沙子(zǐ)等光滑表面不能反射足夠的(de)能量造成的(de)。根據具體的(de)應用場景區域地(dì)貌特征和(hé)對DEM數據連續性的(de)要求來決策是否可(kě)以使用SRTM Plus。
對于ASTER GDEM、ALOS AW3D30來說,數據空洞主要出現在無法從獲取的(de)光學(xué)立體像對中獲得可(kě)靠高(gāo)程信息的(de)區域,通常最主要是由于長(cháng)時間雲層覆蓋導緻。
其次,兩類全球DEM數據都屬于DSM,而非DEM,即高(gāo)程值中包含樹木或建築結構的(de)高(gāo)度,不是研究區域的(de)裸地(dì)面高(gāo)程,這一(yī)點需要特别注意,尤其是在建築物密集的(de)城市區域或樹木集中的(de)林區,如(rú)果研究應用場景需要裸地(dì)面高(gāo)程,則這兩類全球DEM數據均不能滿足。因此,USGS才下定決心搞了一(yī)個GMTED2010,全球多分辨率地(dì)形高(gāo)程數據2010模型,上篇已做(zuò)介紹。全球DEM數據介紹(上)
注
最後,就三個免費全球DEM數據産品而言,SRTM Plus具有最好的(de)垂直精度,ASTER GDEM具有最大的(de)覆蓋區域,ALOS AW3D30具有最好的(de)數據現時性。下面是關于三個免費全球DEM數據的(de)屬性對照表

計劃通過三篇文章(zhāng)來介紹全球DEM數據産品:
上篇 主要介紹DEM的(de)基本概念,高(gāo)程值測量系統與主要組件概念,如(rú)高(gāo)程系統、大地(dì)水準面、正高(gāo)、大地(dì)高(gāo)等內(nèi)容,高(gāo)程數據精度評價指标,全球DEM數據的(de)緣起和(hé)發展概覽,介紹兩個最早發展的(de)全球DEM數據産品家族:ETOPO系列、GTOPO系列。
中篇 主要介紹其餘免費的(de)全球DEM數據産品,免費全球DEM數據産品的(de)獲取方式介紹,并對所有免費全球DEM數據産品做(zuò)整體對比分析。
下篇 主要介紹目前商業公司提供的(de)全球DEM數據産品,并對所有商業全球DEM數據産品做(zuò)整體對比分析。
本文轉載自(zì):

13641387229(公司業務) 13144314475(公司業務)18801198126(公司業務) 17778189097(公司業務) 010-53350658(公司業務) 010-88784566(技術服務) 010-53350672(人事)
010-53350672
atlasinfo@atlasinfo.com.cn
北京市石景山區實興大街30号院3号樓冠輝大廈701室

微信關注“愛特拉斯”